描述
AI Robot Tank Kit with Lidar Camera, Python ROS Control, Autonomous Mapping and Navigation
Product overview
A durable crawler platform built from green aluminum alloy oxide, designed for development, research, and handson robotics projects. Combines precise sensing, strong actuation, and flexible software support for autonomous navigation and robotic arm control.
Key benefits
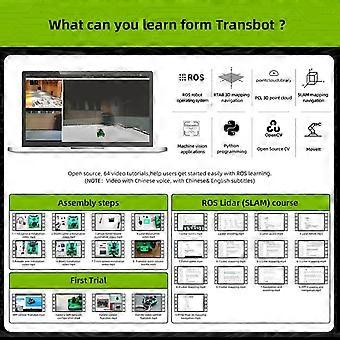
Ready for development and testing: Integrated SLAM lidar, HD camera, and depth camera provide the sensing needed for mapping, obstacle detection, and visual tasks without extra hardware.
Reliable performance: torque gear motors and a robust robot expansion board deliver stable motion and sufficient torque for field maneuvers and payload handling.
Seamless integration with common robotics tools: Full support for Python and ROS with Rviz, MoveIt, and Qt toolboxes enables realworld simulation, visualization, and programmable arm control.
Multiple control options: Operate the platform through a mobile app, a handheld controller for FPVstyle driving, or JupyterLab for online programming and algorithm development.
Versatile and compact platform: The crawler chassis offers low ground pressure and stable traction for indoor labs and controlled outdoor environments.
Features and specifications
Chassis material: Green aluminum alloy oxide for a lightweight, corrosionresistant structure.
Drive system: Crawler tracks driven by torque gear motors for stable movement across varied surfaces.
Sensing: SLAM lidar for mapping and localization; HD camera for visual feedback; depth camera for 3D perception and obstacle avoidance.
Control electronics: performance robot expansion board providing I O and compute resources for sensors, motor drivers, and peripheral devices.
Software compatibility: Native support for Python and ROS; works with Rviz for visualization, MoveIt for arm motion planning, and Qt toolboxes for interface development.
Programming and control interfaces: Mobile application for remote control, handheld controller for FPV operation, and JupyterLab for interactive coding and testing.
How this product solves common problems
Reduces integration time by combining essential sensors, motors, and a ready expansion board on a single platform.
Simplifies transition from simulation to real world through ROScompatible toolchains and Rviz MoveIt workflows.
Supports both beginners and experienced developers by offering plugandplay control methods and programmatic access via Python and JupyterLab.
Practical use scenarios
Autonomous mapping and inspection: Use SLAM lidar and depth sensing to create maps of indoor environments, navigate autonomously, and log sensor data for analysis.
Robotic arm research and pickandplace tasks: Combine the platform with a manipulator and MoveIt planning to prototype arm motions, object detection, and manipulation workflows.
Education and prototyping: Teach robotics concepts or prototype algorithms with handson control via mobile app, FPV handheld driving, and JupyterLab scripting.
Why choose this platform
The crawler platform brings together robust mechanical design, trusted sensing components, and broad software compatibility to accelerate development. It is well suited for labs, classrooms, and prototype deployments where reliable navigation, manipulability, and flexible control are priorities.
-
Fruugo ID:
462950057-974166391
-
EAN:
6091977453634