描述
AI Robot Tank Kit with Lidar Mapping, ROS and Python Programming, HD Vision Tracked Crawler Platform
Robust crawler robot designed for development, testing, and field deployment
Why this robot matters
Reliable mobility and durability for realworld tasks. The crawler chassis, built from green aluminum alloy oxide, provides a sturdy platform that handles rough surfaces while keeping the system lightweight and serviceable.
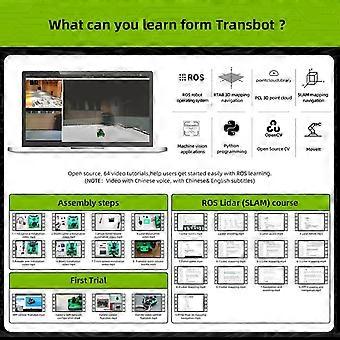
Accurate perception and mapping. Builtin SLAM lidar plus HD and depth cameras deliver precise environment sensing for navigation, obstacle avoidance, and 3D reconstruction.
Ready for advanced control and development. torque gear motors and a powerful robot expansion board provide the torque and I O needed for dynamic maneuvers and accessory integration.
Flexible integration and simulation. Full Python and ROS support with Rviz, Movelt, and Qt toolboxes lets you control a robotic arm and run realistic simulations that match hardware behavior.
Multiple control options. Operate the system from a mobile app, a handheld controller for FPV operation, or through JupyterLab for online programming and algorithm development.
Key features and attributes
Material: green aluminum alloy oxide chassis for a durable, corrosion resistant exterior.
Mobility: tracked crawler design for improved traction and stability on uneven terrain.
Sensing: SLAM lidar with HD camera and depth camera for synchronized visual and depth data.
Actuation: torque gear motors provide reliable drive force for movement and payloads.
Expansion: onboard robot expansion board for sensors, actuators, and custom electronics.
Software compatibility: Native support for Python and ROS; works with Rviz, Movelt, and Qt toolboxes for visualization, motion planning, and HMI development.
Control methods: mobile application, handheld controller for firstperson view operation, and cloud or local JupyterLab environments for code development and testing.
Use in simulation: integrate with ROS toolboxes for endtoend simulation of robotic arm tasks and navigation scenarios.
How it solves common problems
Reduces development time by providing an integrated hardware and software stack for perception, mapping, and control, so teams can focus on algorithms rather than lowlevel integration.
Improves reliability in testing and deployment through a robust metal chassis and torque motors that tolerate tougher conditions than consumer platforms.
Enables realistic validation by linking real hardware to ROS simulations using Rviz and Movelt, so behavior in simulation closely matches physical performance.
Supports multiple users and workflows with both intuitive remote control and programmatic access for researchers, students, and developers.
Practical application scenarios
1. Autonomous navigation research
Use the SLAM lidar and depth sensing to develop and benchmark mapping and path planning algorithms. Visualize results in Rviz and iterate in simulation before deploying to the physical platform.
2. Remote inspection and monitoring
Operate the crawler via handheld controller for FPV inspections of confined or hazardous spaces. HD and depth cameras provide situational awareness and measurement capability for asset inspection.
3. Robotics education and prototyping
Teach ROS based perception and control concepts using the integrated toolchain. Students can program in Python through JupyterLab, test motion plans with Movelt, and observe behavior on the real robot.
What sets this platform apart
Purpose built as an integrated research and development platform with industrial grade materials and components.
Balanced combination of advanced sensors, strong actuation, and a flexible expansion interface for custom projects.
Direct support for ROS toolchains and common development workflows, enabling a smooth transition from simulation to real world testing.
Compatibility notes
Designed to interface with ROS based toolkits and Python development environments including Rviz, Movelt, Qt toolboxes, and JupyterLab.
Expansion board provides standard connectivity for additional sensors and actuators used in robotics development.
Summary
A durable, sensor rich crawler platform for navigation, perception, and robotic arm development. The combination of SLAM lidar, HD and depth cameras, torque motors, and ROS and Python compatibility makes it suitable for research, inspection, and educational use cases where reliable hardware and flexible control are essential.
-
Fruugo ID:
462152493-972797799
-
EAN:
6091977218301