描述
AI Robot Tank with Lidar SLAM Navigation, ROS Python Programmable Tracked Platform
This tracked robot platform combines durable hardware and flexible software to accelerate robotics development, testing, and field tasks.
Key benefits
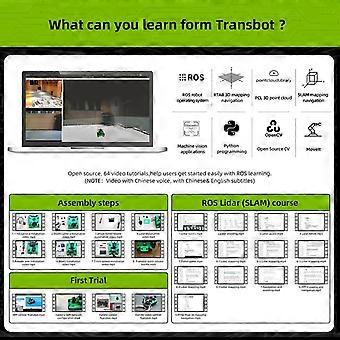
Ready for realworld navigation and mapping: SLAM lidar and HD plus depth cameras provide accurate environment sensing for mapping, obstacle detection, and autonomous path planning.
Faster development and simulation: Python and ROS integration with Rviz, Movelt, and Qt toolboxes lets you prototype, simulate, and tune robotic arm and motion control workflows before deploying on hardware.
Reliable hardware performance: torque gear motors and a powerful robot expansion board deliver stable drive and expansion capacity for sensors and actuators.
Easy crossplatform control: Operate the robot from a mobile app, a handle controller for FPV operation, or JupyterLab for online programming and experiments.
Durable, versatile chassis: The green aluminum alloy oxide crawler frame combines a sleek look with strength and a compact tracked form factor for stable movement over varied indoor surfaces.
What stands out
Integrated perception and motion stack: Combining SLAM lidar with HD and depth cameras gives multiple data sources for robust localization and scene understanding.
Expandable and programmable: The onboard robot expansion board supports additional sensors, actuators, and custom control logic using Python and ROS.
Multitoolchain support: Work seamlessly between simulation and hardware using Rviz, Movelt, and Qt toolboxes for visualization, motion planning, and human machine interfaces.
Multiple control modes: Switch between autonomous operation, handlebased FPV control, app commands, or direct programming in JupyterLab to match the task and user skill level.
Technical highlights and attributes
Chassis material and finish: Green aluminum alloy oxide provides a durable, lightweight frame and corrosionresistant finish.
Mobility: Tracked crawler design for stable traction and compact footprint suitable for indoor environments.
Sensors: SLAM lidar for mapping and localization; HD camera and depth camera for visual perception and distance measurement.
Actuation: torque gear motors for reliable traction and payload handling.
Electronics: Builtin robot expansion board to manage sensors, motors, and custom modules; compatible with Python and ROS software stacks.
Software compatibility: Supports Python programming, ROS toolchains, Rviz, Movelt, and Qt toolboxes for simulation and robotic arm control.
Control interfaces: Mobile app control, handle controller for FPV effects, and JupyterLab online programming for development and remote operation.
Practical applications
Research and education: Use the platform for classroom labs and research projects that require SLAM mapping, manipulation, and ROS based development workflows.
Inspection and indoor mapping: Deploy the crawler to create detailed indoor maps, inspect hardtoreach areas, or perform routine visual and depth inspections with remote FPV control.
Robotic arm development and testing: Integrate a manipulator and use Rviz and Movelt for motion planning and simulation, then validate behaviors on the physical robot using the expansion board and Python scripts.
Who this is for
Robotics students and educators who need a reliable, programmable platform for handson learning.
Developers and researchers building and validating navigation, perception, and manipulation algorithms.
Makers and integrators who require a compact, expandable robot base for prototyping sensor and actuator configurations.
The platform delivers a durable, sensorrich crawler base with multitoolchain software support and flexible control options to reduce development time and bridge simulation to hardware testing.
-
Fruugo ID:
462970586-974193494
-
EAN:
6091977426997