描述
ROS Robot Tank with Lidar, Python Programmable Autonomous Mapping Crawler with HD Depth Vision
A compact, durable crawler platform designed for developers, researchers, and hobbyists who need a reliable mobile robot for sensing, navigation, and manipulation tasks.
Key benefits
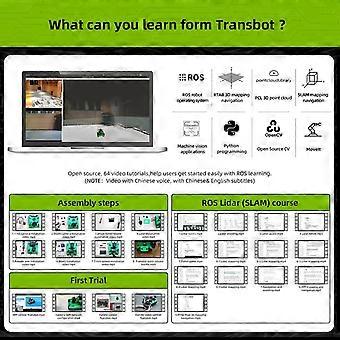
Ready for mapping and autonomous navigation: Integrated SLAM lidar plus HD and depth cameras provide the sensing needed for realtime mapping, obstacle detection, and environment awareness.
Robust chassis and materials: Built from green aluminum alloy oxide for a durable, corrosionresistant body that stays lightweight and maneuverable.
Strong mobility and payload support: torque gear motors deliver dependable traction and control across varied surfaces while supporting added sensors or a small robotic arm.
Expandable control and computing: Includes a powerful robot expansion board to host custom controllers, sensors, and peripherals without a major redesign.
Fast development with standard toolchains: Native Python and ROS support with Rviz, Movelt, and Qt toolboxes enables simulation, planning, and precise robotic arm control in familiar environments.
Flexible operation modes: Control via a mobile app, handheld controller for FPV driving, or JupyterLab for online programming and data analysis.
Features and function
SLAM lidar for accurate localization and map building during autonomous runs.
HD and depth cameras for vision, object detection, and 3D perception tasks.
torque gear motors in a crawler drive layout for stable movement and traction.
Green aluminum alloy oxide chassis offering a balance of strength and low weight.
Robot expansion board for additional sensors, actuators, and compute modules.
Software compatibility with Python, ROS, Rviz, Movelt, and Qt toolboxes for full simulation and deployment workflows.
Compatibility and performance
Designed to work with standard ROS toolchains and Python robotics libraries for seamless integration into existing projects.
Hardware and software provide a platform suitable for sensor fusion, motion planning, and robotic arm control without needing major custom drivers.
Compact form factor and modular expansion make it adaptable to labs, classrooms, and field testing.
Practical applications
Research and development: Use as a testbed for SLAM algorithms, perception pipelines, and robotic arm manipulation in simulated and real environments.
Education and training: Teach robotics concepts from sensor integration to motion planning using Rviz, Movelt, and handson programming in JupyterLab.
Inspection and monitoring: Deploy for indoor inspection or controlled outdoor surveys where visual and depth sensing plus stable crawling mobility are required.
What makes it stand out
Complete hardware set focused on sensing, mobility, and expansion in a single platform.
Direct support for common robotic toolboxes and programming environments to shorten development time.
Durable materials and torque drive components provide consistent field performance while remaining adaptable for .
Package notes
The platform is supplied as a crawler robot tank with integrated sensors, motors, and an expansion board. Software toolchain support includes Python and ROS with Rviz, Movelt, and Qt toolboxes for simulation and control.
This robot platform is intended for developers and educators who need a reliable, extensible mobile base that integrates advanced sensing, standard robotics software toolchains, and flexible control options.
-
Fruugo ID:
465167327-977919155
-
EAN:
6119562998053